La tarea
La práctica consiste en modelar e incluir el robot en el ecosistems ros2 para desppues teleoperarlo para ejecutar una
secuencia de tres acciones. La manipulación se realiza con el plugin MoveIt
y la navegación de la base con teleop_twist_keyboard publicando comandos
de velocidad en /cmd_vel.
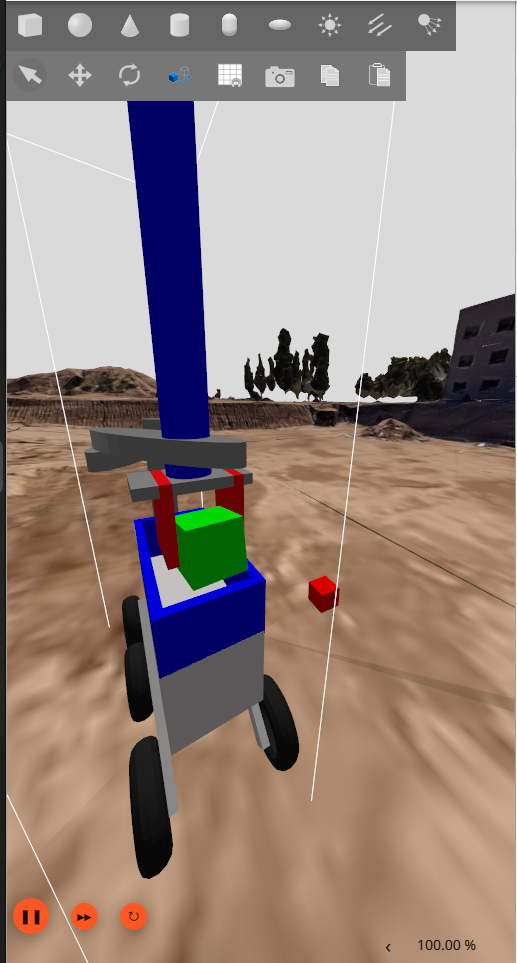
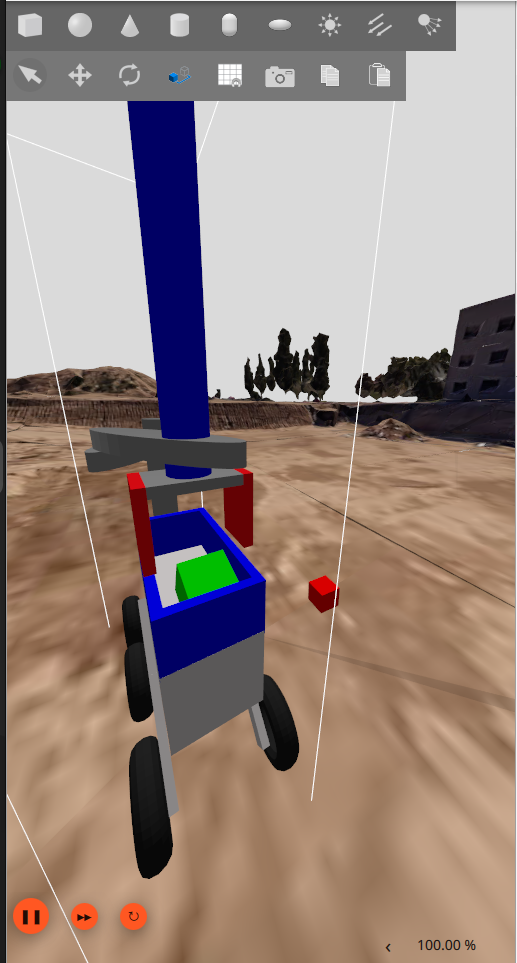
Posicionado frente al robot. El brazo se telecopera con MoveIt hasta asir el cubo y depositarlo en el compartimento del robot.
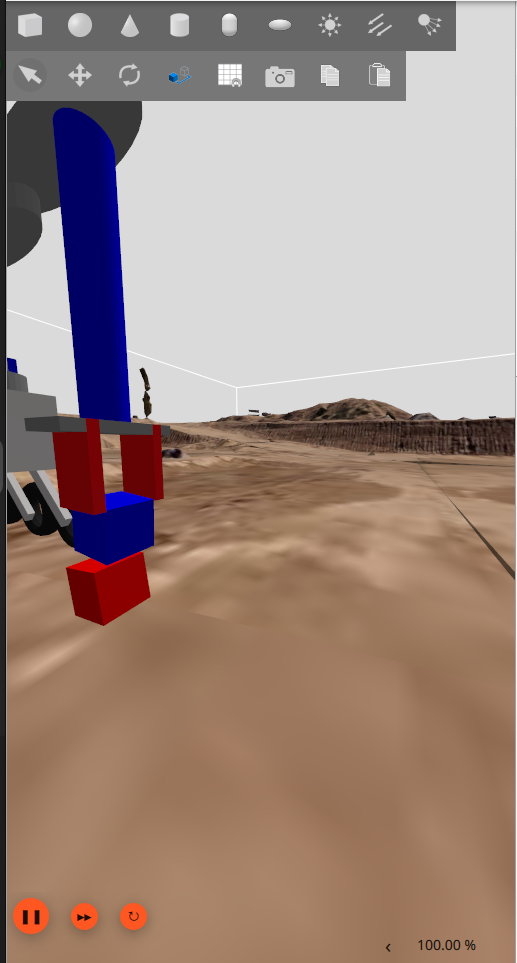
El cubo azul se encuentra a la izquierda. Con el brazo se recoge y se coloca sobre el cubo rojo situado a la derecha del robot.
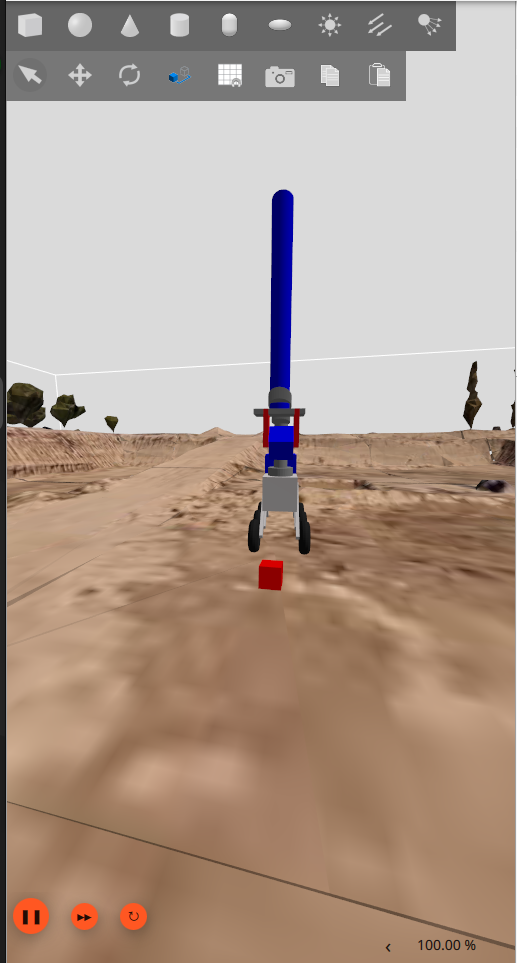
Mediante teleop_twist_keyboard se publica velocidad lineal positiva en X hasta completar 10 metros de trayectoria rectilínea.
Captura de datos con rosbag
ros2 bag record /cmd_vel /imu /joint_states \ -o practica3_amanza17
El rosbag captura los tres topics durante toda la ejecución de la secuencia.
Rosbag
Capturas RViz
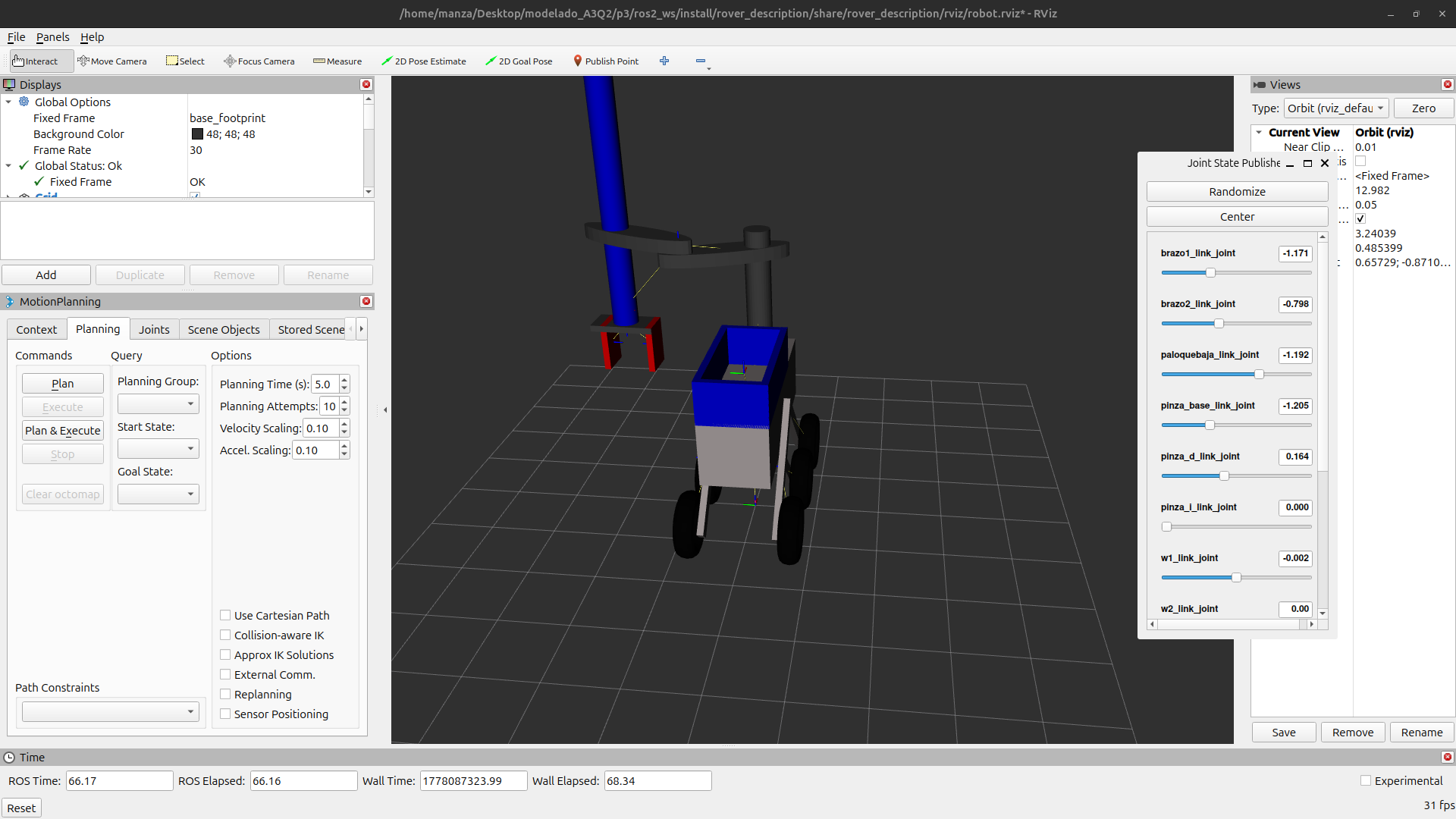
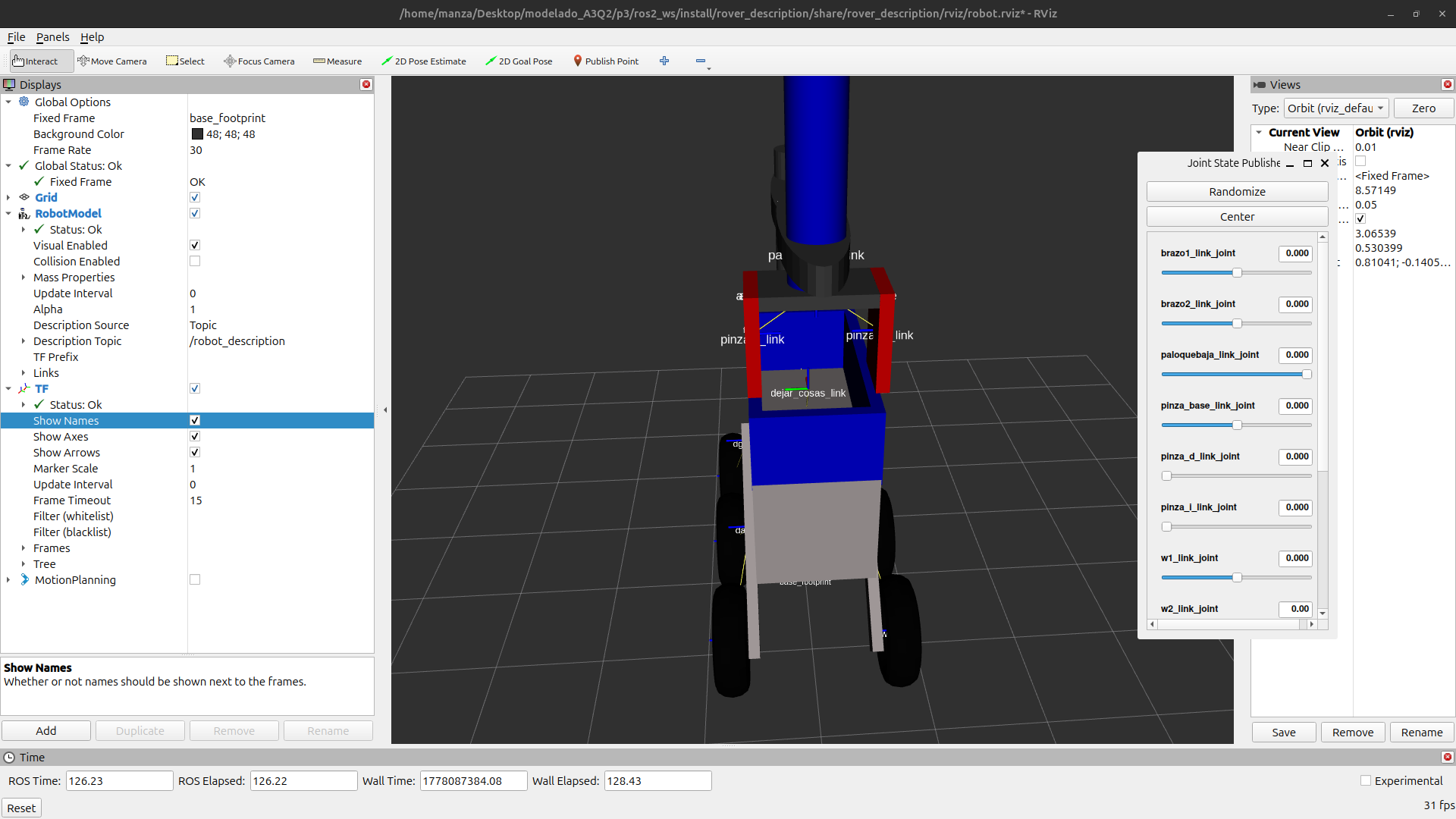
Captura de RViz mostrando el robot con los TFs visibles, la interfaz de joint_state_publisher_gui activa y al menos tres articulaciones desplazadas respecto a su posición de reposo.
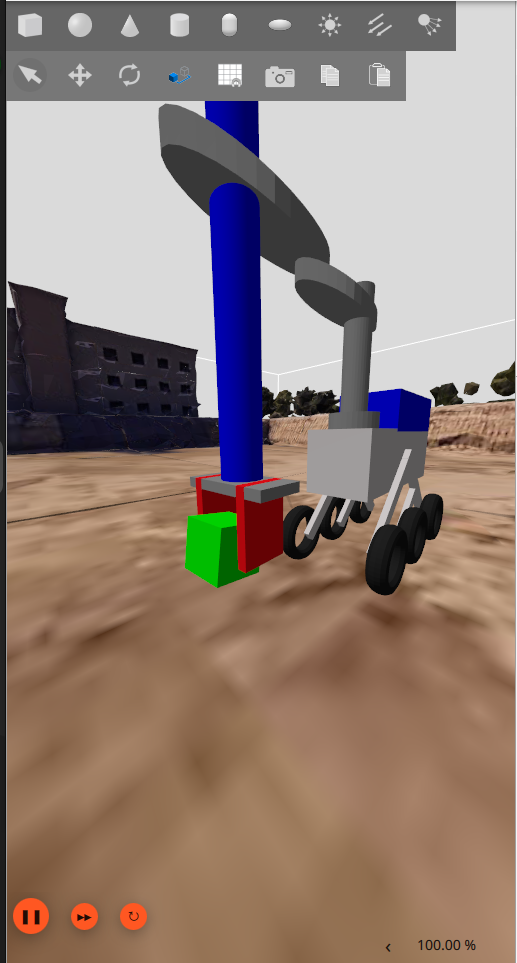
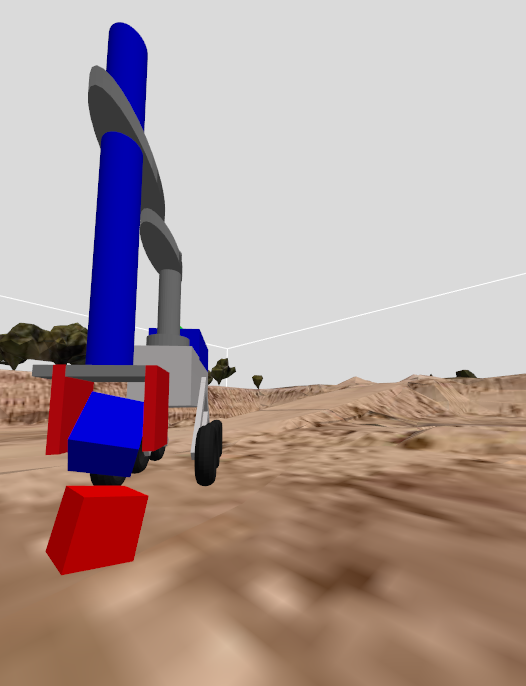
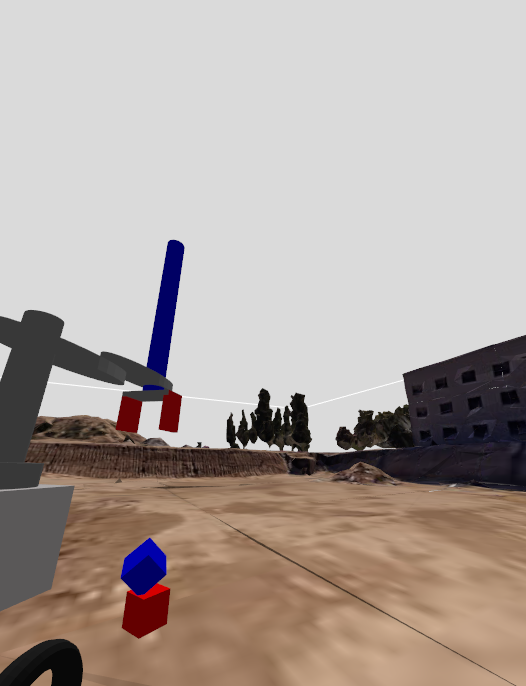
Galería Gazebo
Capturas tomadas en Gazebo durante la ejecución de la práctica.


Visor URDF 3D
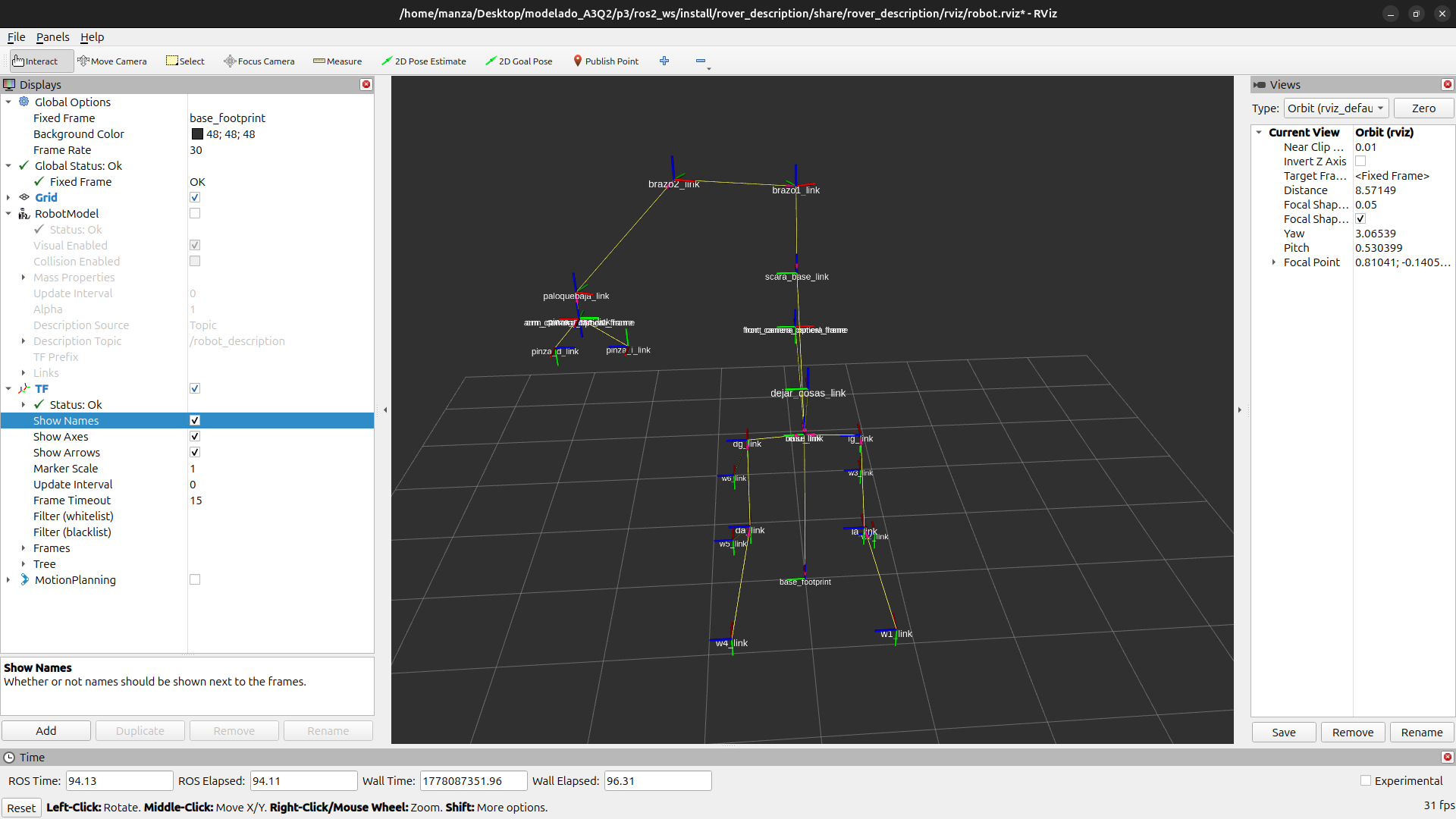
Por fallos de orientación/carga en las meshes dg, da, ig e ia,
no se muestran en el visor. Se mantienen como enlaces fijos dentro de la jerarquía del URDF.
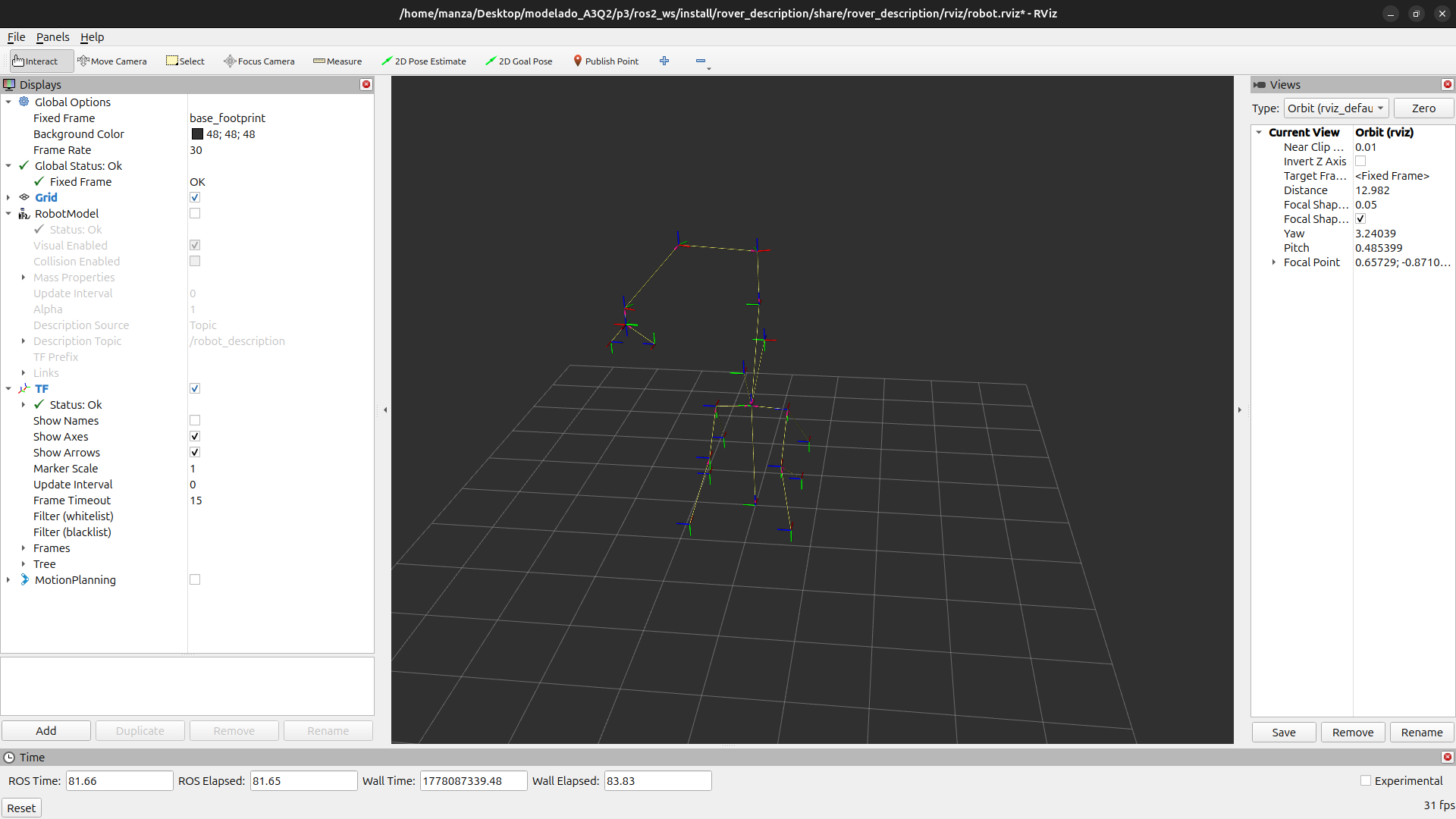
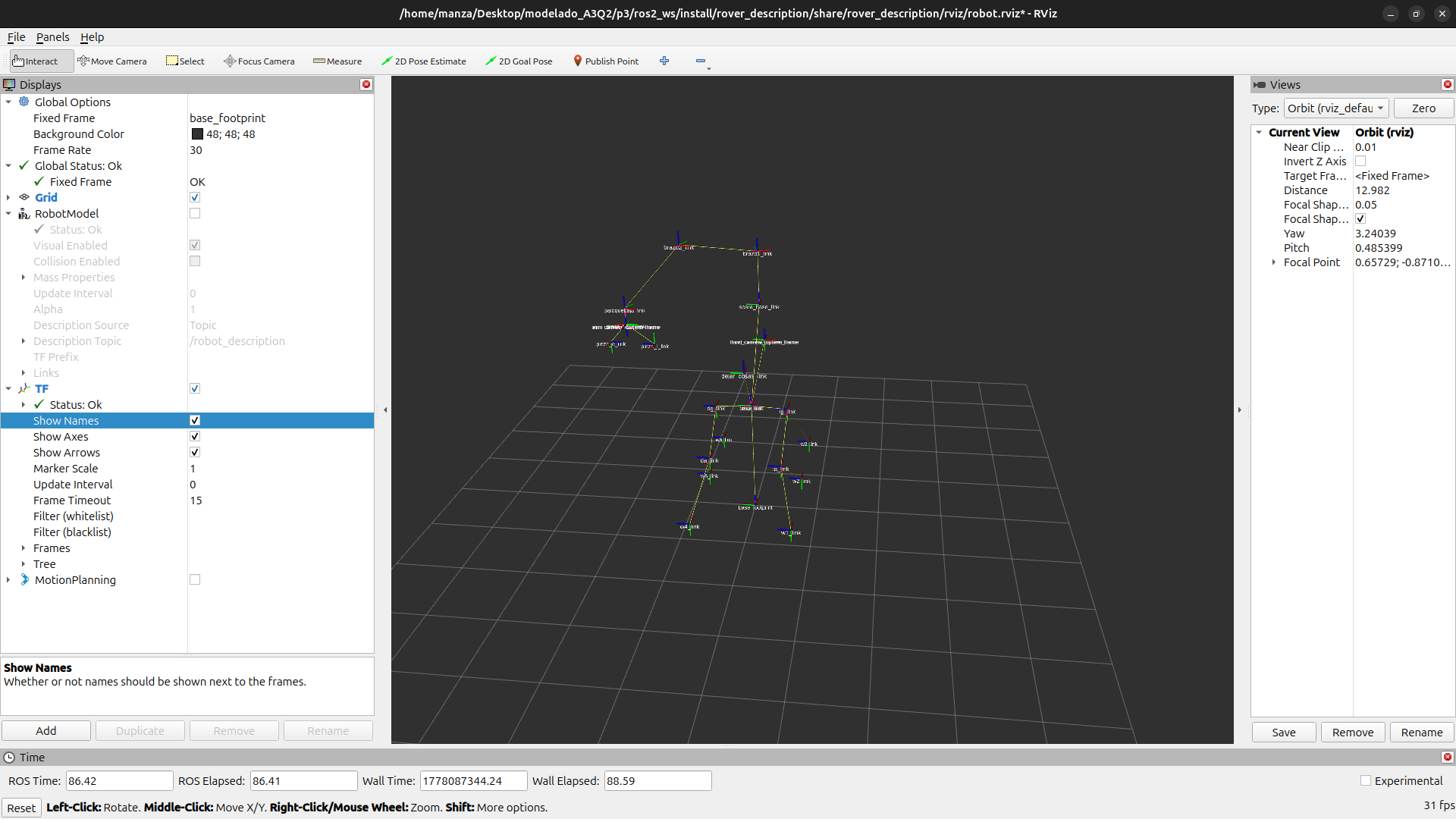
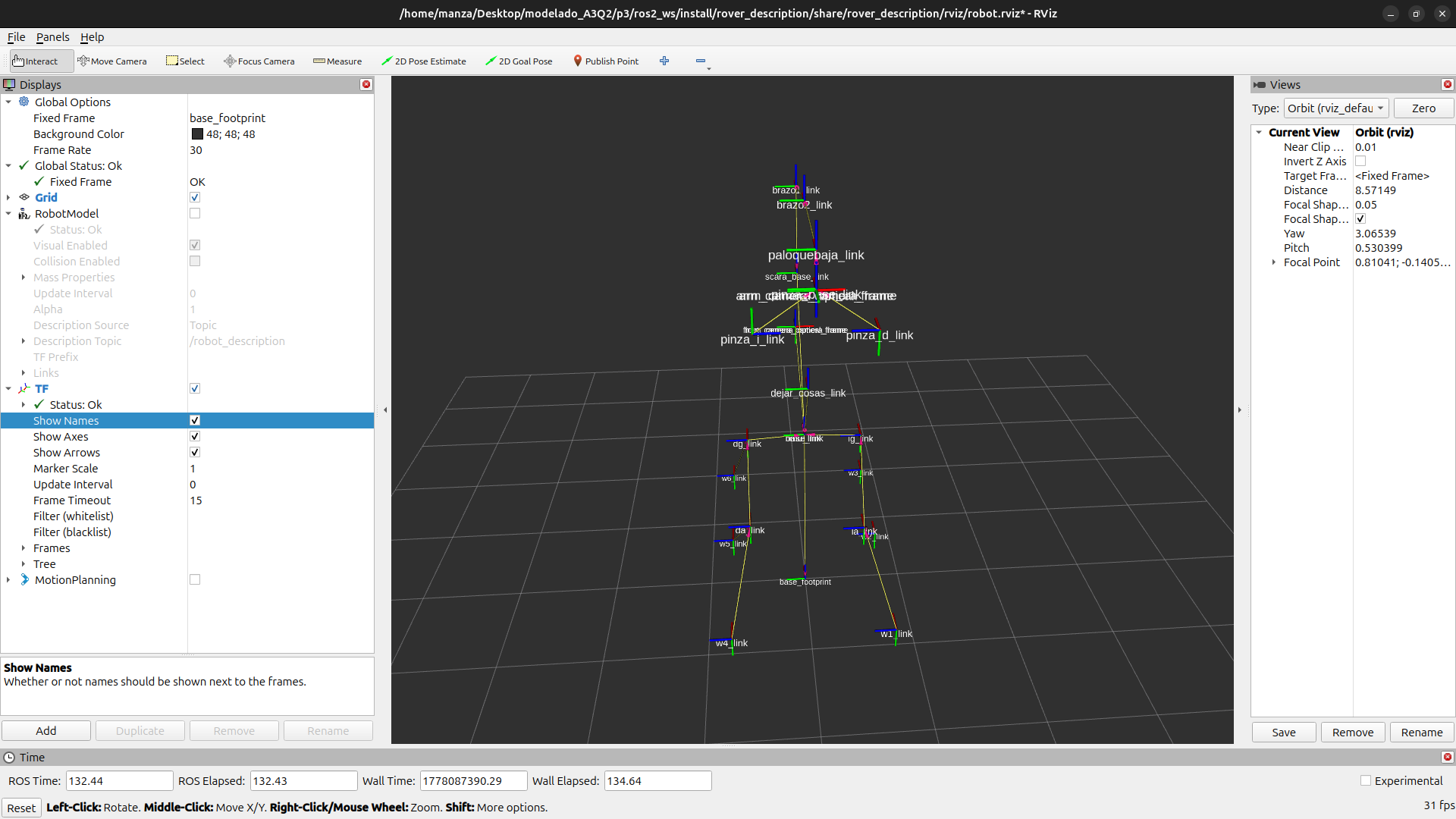
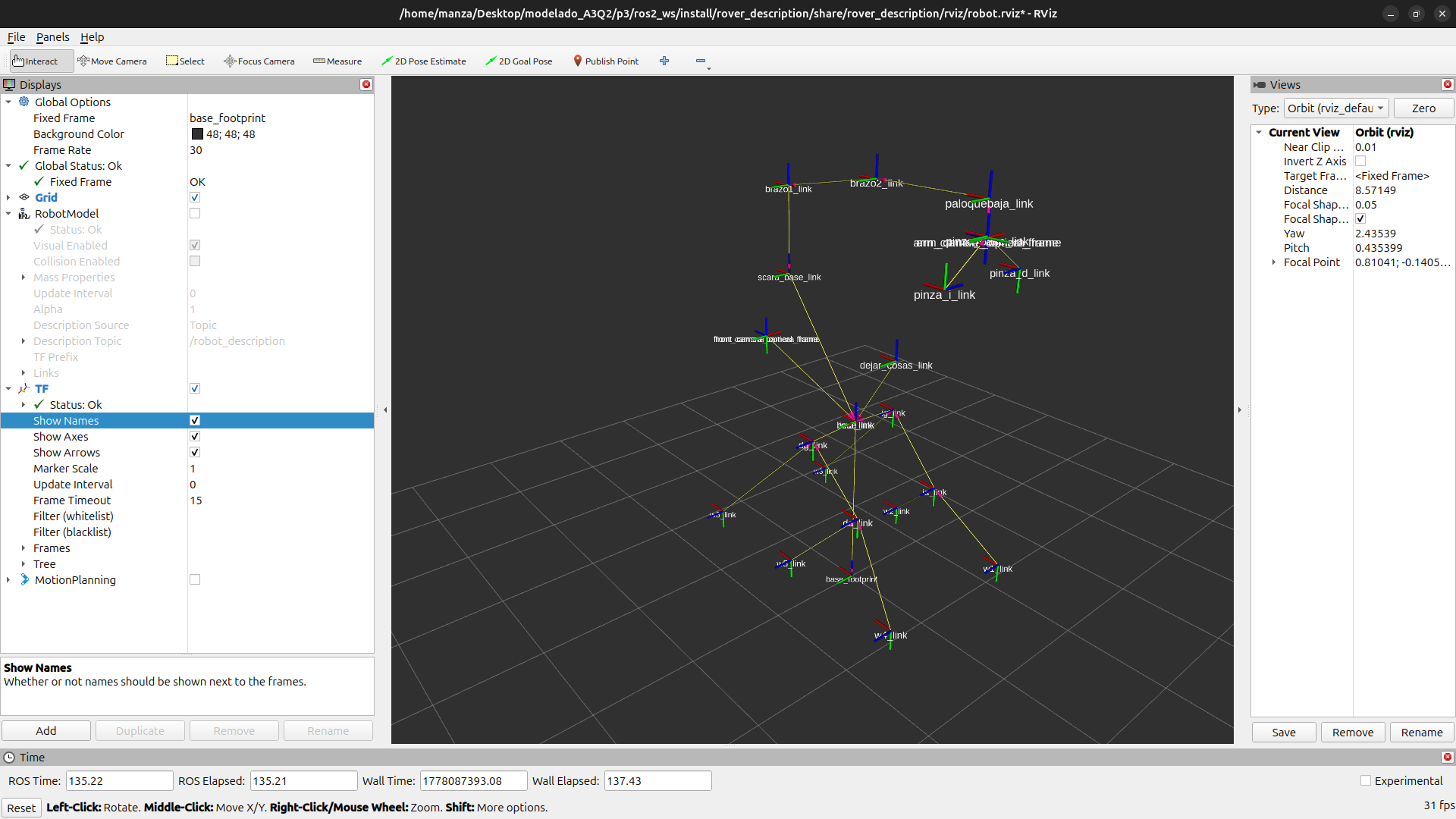
Árbol de transformadas
El árbol TF representa las relaciones geométricas entre cada frame del robot. Se genera con:
ros2 run tf2_tools view_frames
Gráficas
Análisis
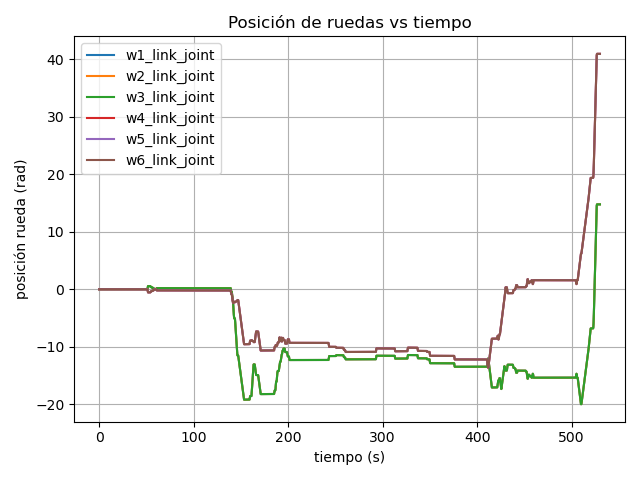
La gráfica muestra el ángulo acumulado (en radianes) de cada rueda del robot a lo largo del tiempo. Durante las fases de manipulación con el brazo, las ruedas permanecen bastante estáticas (quitando algún ligero ajuste). Al iniciarse la fase de desplazamiento rectilíneo de 10 m, se observa un incremento lineal y simétrico en ambas ruedas, indicando movimiento hacia adelante sin giro. Cualquier asimetría transitoria refleja correcciones durante la teleoperación. Aunque se ha tomado la información de las 6 ruedas, las 3 de la derecha se mueven igual entre sí, y lo mismo pasa con las 3 de la izquierda, por eso se presentan dos lineas únicamente.
Análisis
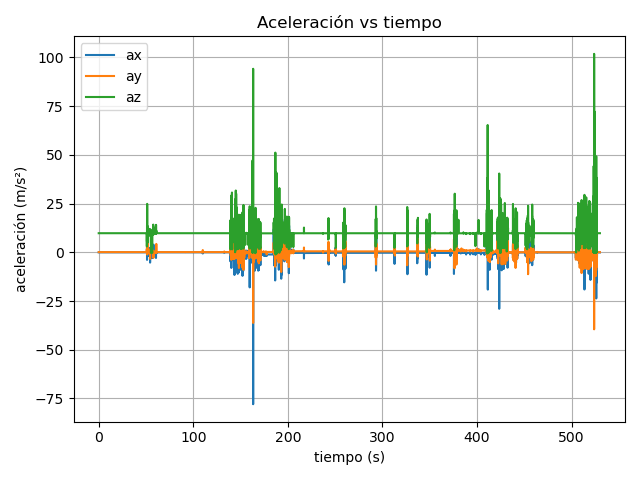
Los datos de la IMU reflejan la aceleración lineal del chasis. En reposo se aprecia la componente gravitatoria en Z (~9.81 m/s²). Los picos transitorios en X corresponden a los arranques y paradas de la base durante la teleoperación. Los movimientos del brazo introducen vibraciones de alta frecuencia de baja amplitud, visibles como ruido sobre la señal base. La fase de avance rectilíneo muestra una aceleración positiva inicial seguida de valor cercano a cero en régimen estacionario.
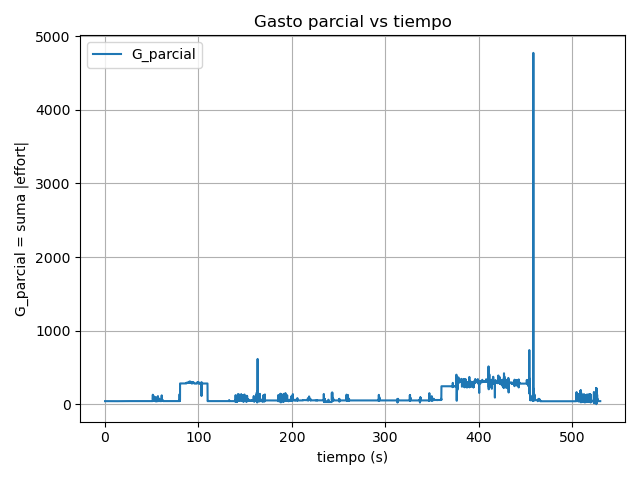
Análisis
El campo effort de /joint_states representa el par (torque)
aplicado en cada articulación. Durante la recogida del cubo verde se detectan picos de
esfuerzo en los joints distales del brazo al soportar el peso del objeto.
Al apilar el cubo azul sobre el rojo, el esfuerzo aumenta en los joints proximales que
deben compensar el momento de inercia del brazo extendido. Durante el avance de 10 m,
el esfuerzo en los joints del brazo se deberia mantener aproximadamente constante, aunque nos damos cuenta de que no es asi, sino a reves,
hay un pico de esfuerzo, esto, seguramente sea por el arranque a velocidad alte (subí la velocidad del teleop) y seguramente
haya hecho que el brazo tambalee y por eso genere tanto gasto.
Comandos de lanzamiento
Lanzar simulación
ros2 ros2 launch rover_description partea.launch.py
Lanzar moveit
ros2 ros2 launch rover_moveit_description move_group.launch.py
Lanzar simulación
ros2 ros2 launch rover_description controllers.launch.py
Control de la base
ros2 ros2 run teleop_twist_keyboard teleop_twist_keyboard
Extraer datos de la rosbag
ros2 ros2 launch tools plot.launch.py
Graficar csvs
ros2 python3 plot.py